The group is uniquely positioned to exploit the wealth of in-house expertise offered by other groups at RAL Space, such as Mechanical Engineering and Systems Engineering, where collaborative working allows us to participate in and promote development and testing of unique hardware and software systems.
Primarily, the group focus on projects aimed at furthering and benchmarking space robotic systems for use on planned and conceptual ESA missions. The group has been involved in a number of benchmarking and Verification and Validation (V&V) field trials for ESA. The goal of these fields test is to test functionality of different systems such as navigation or instruments and to assess their performance. The group has experience in field trial management and support and bespoke, rugged and versatile rover platforms.
The group is also involved in more terrestrial applications surrounding the use of custom designed ground robots for farming, mining and other applications. This work is augmented with the group’s experience in the operation and use of UAV platforms for aerial imaging and digital elevation model (DEM) generation as well as high resolution NDVI and spectrograph imaging, where the group are involved in exploring novel ways of using both ground and aerial systems within agriculture and other areas.
Software
The Autonomous Systems Group has expertise in autonomous navigation and other software for mobile robots, Robot Operating System (ROS), High Level Architecture (HLA), and software control of other physical systems such as motors, linear actuators and systems as outlined below. You can find some of the group’s software on Github
here.
Hardware
Linckia robot controller board
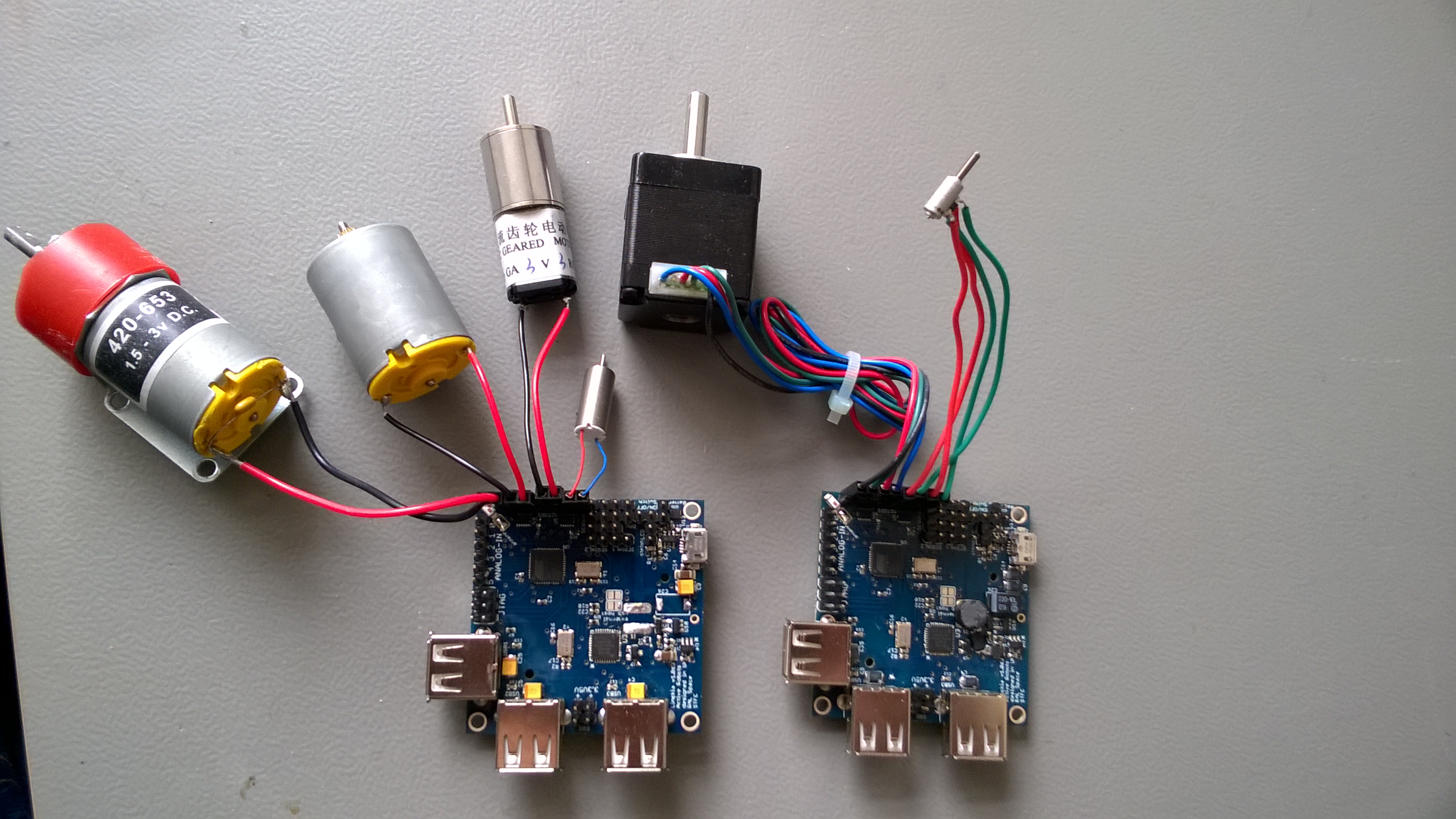
The Linckia v5.0 Controller is 50mm x 50mm in size and it really packs a punch in terms of features and capability, both in hardware and software. With full access to the OpenWRT kernel, you can program in a variety of languages and access the on-board hardware. For novices there is an easy to use GUI accessible by connecting over wifi, you can drive the rover, view cameras and even create custom interfaces to the Linckia's onboard hardware I/O, all from your web browser. For more information please visit the Linkcia page (hyperlink to Linckia page)
- Carambola2 wifi enabled processor, featuring a Qualcomm/Atheros AR9331 SoC @400MHz
- OpenWRT linux kernel
- Custom easy access control GUI
- ATMEGA32U4 Arduino compatible (Leonardo)
- 4 Port Powered USB Hub, 3 available for expansion use
- 1S Lithium Battery Charger, with reverse polarity protection
- 2-5v Power Management
- 4 DC Motor Drivers, 1.5A per 2 Channels, can be paired and used as 2 Stepper Motor Controllers
- 3 PWM outputs, usable as Servo Control Outputs
- 6 Analog Inputs, optional self-battery monitoring
- 2 Serial Ports
- 1 I2C
- Self-reset and On/Off switch
- 3 LEDs
- 5v and 3.3v Outputs
Robot Hand

The AR10 Robotic Hand provides a complete solution for academia and can be used across a variety of systems and interfaces to provide researchers and educators alike with a versatile, low cost platform. The AR10 hand can be used as a stand-alone platform or at the end of a robot arm such as Rethink Robotics’ Sawyer or Baxter research robot.
- 10 Degrees of freedom actuated by Firgelli linear actuators
- GUI for easy control, Fully ROS Compatible including Rviz & MoveIt
- USB or Serial, 4 extra analogue inputs for expansion
- 12-30V power required
- Anodised Aluminium core, 3D printed fingertips and circuit board carriers
Drill

A small sampling drill that has been developed for sample collection in agricultural use-cases.
- Up to 12 samples collected from field or analysed on board
- Sample conditioning (moisture removal)
- Sample discarding and sample container cleaning during operations
- Compatible with LIBS instrument (see below) or other in-situ analysis equipment
LIBS instrument
Laser Induced Breakdown Spectrometer that has been developed for in-situ soil quality analysis. Using the same principle as ChemCam on board NASA’s Curiosity rover this instrument was designed for Earth use but similarly designed for deployment on board a rover.
• Sub nanosecond pulse laser
• Capable of LIBS on air to calibration
• Instantaneous spectrum analysis of created plasma
• Can be repeated many times on the same sample to increase confidence or analyse area or depth
Stereo LWIR camera

This small stereo IR camera has been developed for creating elevation maps based on visual and infrared data. It has been tested using a COTS DJI Inspire 1 UAV. It could also be used on board a rover for obstacle avoidance.
- 2 cameras each 60x60 pixel
- Spot temperature sensor for calibration
- IMU + GPS for position information
- Build in battery
- On-board recording to SD card or serial interface
Some of these technologies are available for licensing.
For more information please contact: RAL Space Enquiries