MARVIN (Mars Analogue Rover for Validation of Instrumentation and Navigation)
This robot is in development commissioned by the UK Space Agency to create a highly capable test platform for upcoming field trial campaigns and will be rolled out March 2018. More information will be published as the project progresses.
Newton Robots aka Agri-rover
5 robots called: Vaporeon, Jolteon, Flareon , Leafeon and Glaceon

Five robots have been designed to handle rough terrain, each equipped with 4-wheel steering and over 8 hours battery capacity. They are also designed to be small so they can fit through a row of maize, be transported easily and deployed by a single person. These robots have been used for multiple agricultural projects by universities across the UK including University of Sussex and University of Strathclyde and in China including CALT and NERCITA.
In previous project these robots carried navigation equipment (cameras and GPS), hyperspectral cameras, Laser Induced Breakdown Spectrometer and even 5 Degrees of Freedom robot arm with cutter tool.
Newton Robot Leafeon in maize field going down between the rows
during navigation tests at University of Harper Adams in 2015
These robots are available as part of the Field Trials Unit. They can be used for autonomy testing, or instrument deployment and due to their small size they are very convenient to take to test sites even as luggage in a flight. With the 8 hours run time on batteries and overnight charging they can be used continuously even over long field deployments where substantial range or coverage is needed. The accurate steering helps navigation and obstacle avoidance.
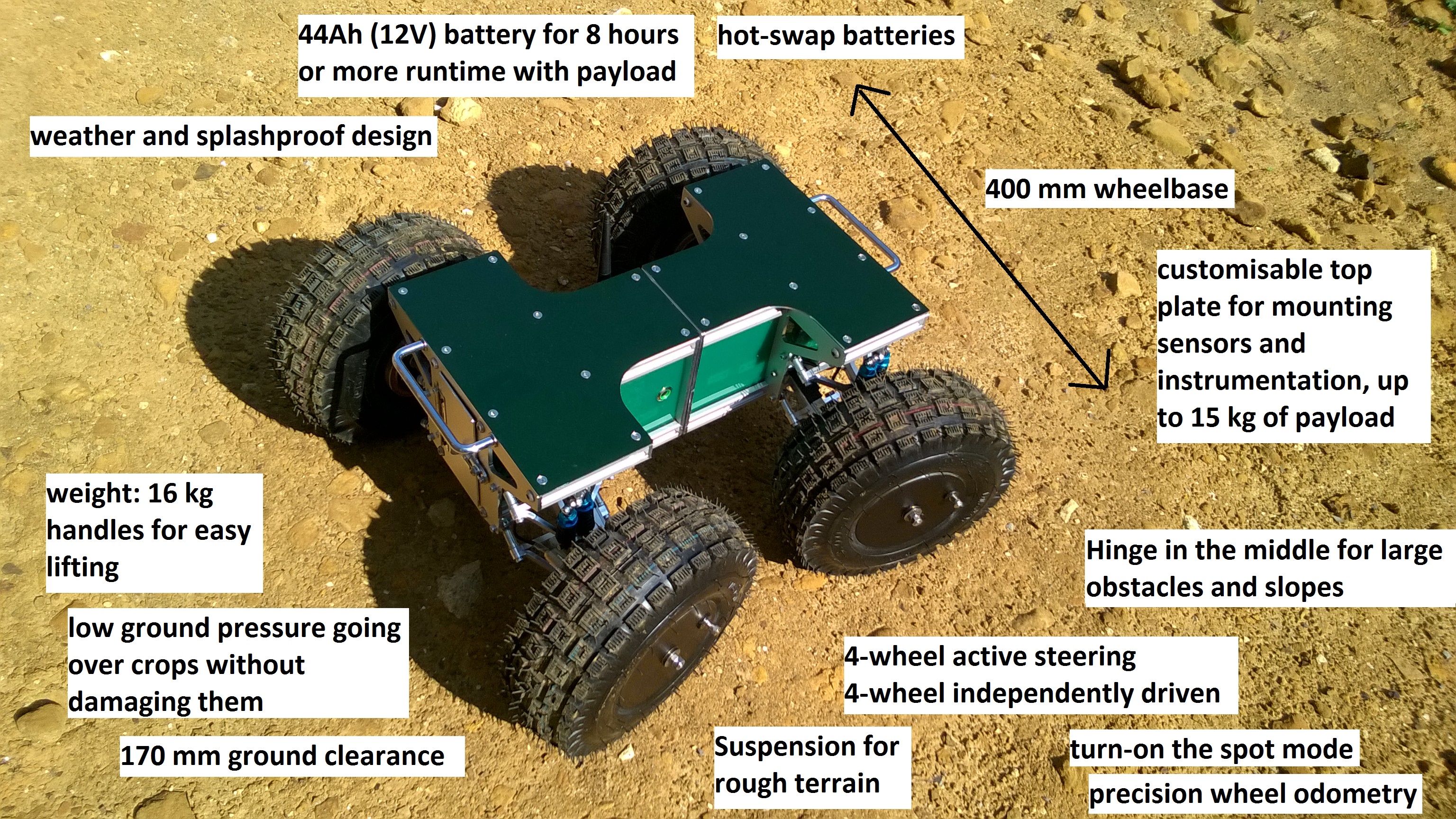 Precision 4 wheel steering, each wheel independently steerable
Precision 4 wheel steering, each wheel independently steerable
- All wheels are on the ground at all times (hinge in the middle)
- Over 8 hours battery life
- Lightweight less than 20 kg
- Low ground pressure
- 400 mm width
- 100 mm ground clearance
- Suspension
- High torque in-wheel motors
- Hot-swap battery system
- 15 kg of payload
Newton robot
Large Field Trials Rover Platform
Name: Rimmer
Rimmer was initially used for ESA Startiger project SEEKER field tests in the UK. The robot can handle very rugged terrains and has conducted field trials in the Atacama Desert. Rimmer has exceedingly good battery life (more than 12 hours) and can deal with rough terrain easily. It is designed for slow speed but high torque and can traverse steep slopes, go over rocks, and carry 100 kg of payload. It can house laptops inside for easy testing and has a build in computer, storage and sensors that can be used for autonomous navigation.
- Robust 6 wheel drive and skid-steering

- Long Run time of 12 hours with no payload
- 2 laptop shelves with built in cooling
- Built in wired and wireless network for short range communication
- Long range communication unit
- Low power ARM computer for control
- PTU with stereo camera
- Differential GPS
- Built in low power x86 computer
- Built in solid state storage up to 260GB
- Up to 2TB NAS storage in RAID 1
- Easy maintenance even on rough terrains
- Speed range of 6-20 cm/s with high torque
- Built in battery chargers
- Touch display cooling control
- Approximately 80cm x 130cm footprint and 60cm tall
- Approximately 90kg with a 100kg Payload
Surveyor Robots
The surveyor robots were designed for research and education to provide a small outdoors robot platform for testing for users already familiar with robotics. They can be used to take projects to the next level of integration and even used directly for some applications such as collaborative robots and swarm robot research. The Surveyor robots are equipped with the Linckia robot controller and shipped as kit. The surveyors are Compatible with Robot Operating System (ROS) and can be used in a multi-robot system. More information can be found
here.
• Full aluminium chassis
• High torque motors designed for slow speed over terrain
• 60 mm ground clearance
• Linckia Robot Controller Board
Outreach rovers
4 robots called: Bob, Madge, Cat and Lister
The Outreach rovers have been built to educate students about science and technology and to organise fun workshops for the public. They have been used for many activities over the years including an exhibition at the London Science Museum and BBC Stargazing Live events. Students, children or the general public can remote control a robot with an arm recovering “samples” learning about how robots controlled for planetary exploration and how communication delay means in many cases remote operation is not possible. They learn about the next generation of missions that are aimed at collecting samples and returning them to Earth. For longer workshop at schools the activity help to develop communication skills where the students have to work as a team to plan the next steps of the robot and pass it on the person responsible for controlling the robot who is not able to see the robot directly. After
each event, the robots are reviewed and upgraded for greater robustness, reliability as well as greater functionality.
- 6 degree of freedom arm
- Easy to use GUI
- High definition video streaming
- 12 hours run time
- 2.4 GHz wireless with routing
- Robust and tested
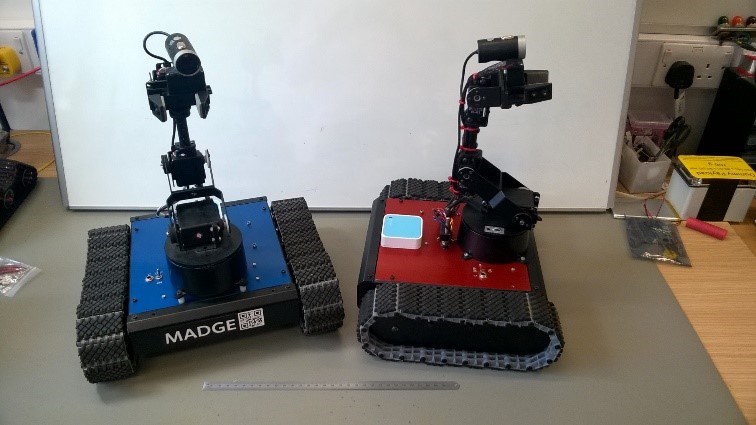

Left to right: Outreach rover Bob at London Science Museum / Outreach rovers Bob and Madge. Bob was once used to check an area of potential explosion hazard before the fire fighters were allowed in.
Medium omnidirectional robot with large payload capacity
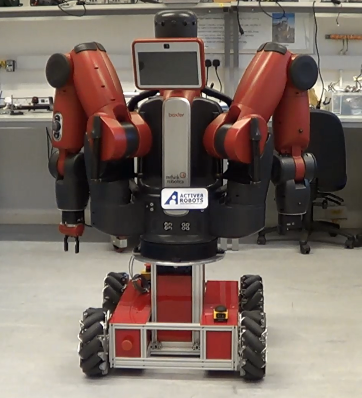 Name:
Name: Baxter Base
Baxter Base was designed as a mobile platform for Rethink Robotics. The Baxter robot produced by Rethink Robotics is pictured on top of the Baxter Base. This robot has more than 6 hour’s battery life for both the base and Baxter. It has custom hub motors that can be used with tyres or mecanum wheels which enable the robot to move in any direction on a flat surface. It is compatible with Robot Operating System and can be controlled by Baxter directly. Without Baxter it has 100 kg of payload capability and can be used to carry instruments or other equipment.
Baxter base during test at RAL Space ASG lab
Robot for inspection of radioactive environments
 Name:
Name: Gerry
Gerry was designed to inspect the highly radioactive “Void Chamber” at the STFC facility ISIS. The robot is controlled via an umbilical cord and can cope with high levels of radiation. It has a long inspection arm that can place the camera system mounted on top 1.5m high and 1m ahead of itself. The low cost camera system has been tested in radioactive environments.
After Dark Robots
 4 robots called:
4 robots called: Leonardo, Michelangelo, Donatello, Raphael
These robots were used during the After Dark event at the Tate Britain museum in London. RAL Space ASG supported The Workers who made this public outreach event. They were designed to be simple and robust with sensors for obstacle detection, failsafe bumpers, and an extremely long battery life of over 10 hours.
Tate Britain museum in London at night with robot roaming around controlled by the public.
VTOL UAV
Name: FireFly6

Mostly using the Commercial Off-The Shelf (COTS) UAV platform FireFly6 by BirdeyeView, this UAV has been modified by the Autonomous Systems Group to accommodate a large payload compartment. The compartment can house instrument that either require view of the ground or the sky above or both.
- Vertical Take-off and Landing
- Hover capability
- 40 minutes + flight time (if mostly in forward flight)
- 1.1 kg payload